
A jövő közlekedése, avagy mi az a segway?
Egyensúlyozó járművek saját testsúllyal vezetve
2017. május 26. | VL online | 5732 |
Önegyensúlyozó elektromos roller? Elektromos gördeszka? Elektromos kétkerekű scooter? A világban is számos névvel illetik a segwayt, a legújabb városi közlekedési eszközt. Igazán hangzatos magyar megfelelője még nincs, bár kíváncsiak lennénk olvasóink ötleteire. Bemutatjuk, hogyan is működik ez a giroszkópos, mikroprocesszorokkal vezérelt, villanymotoros eszköz.
Sok alkatrész kis helyen
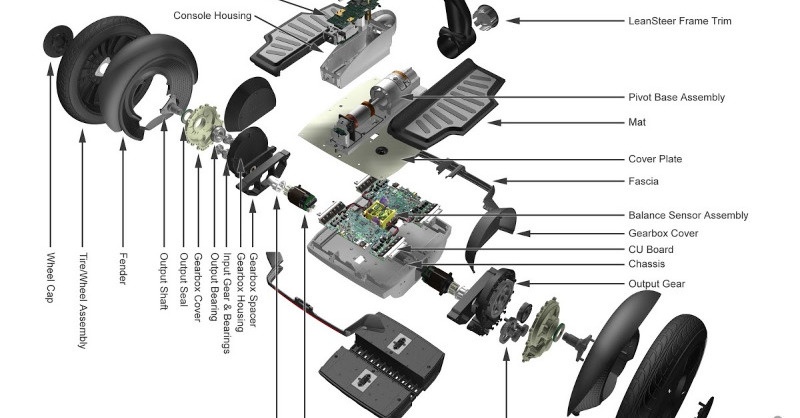
A járműnek két kereke van, melyet egy platform köt össze. A vezető ezen állva a testsúlya áthelyezésével irányítja a segwayt. A hajtásról egy nagy teljesítményű villanymotor gondoskodik, mikroprocesszoros hajtásvezérléssel. Az energiaellátást akkumulátorok biztosítják, a bekapcsolt jármű egyensúlyban tartásáról pedig giroszkópok gondoskodnak. A giroszkóp segítségével a szabályozás ingaként működik, azaz, ha az eszköz nyugalmi állapotából kimozdul, érzékeli a változást, és a megfelelő vezérlésnek köszönhetően az elektromos motorokkal kompenzál, így tartva egyensúlyban a segwayt és utasát. A kisméretű járműben a megfelelő helykihasználás döntő fontosságú, viszonylag sok alkatrészt kell ugyanis elhelyezni a megfelelő és biztonságos működés érdekében.

EC motorok a kerékben
A kerékben foglalnak helyet a könnyen és precízen vezérelhető EC motorok. Az EC (ElectronicallyCommutated) motorok az egyenáramú motorok hagyományos szénkefés kommutációja helyett kefe nélküli, elektronikusan vezérelt kommutációt alkalmaznak egyenáramú megtáplálással. Manapság már 7 kW-ig gyártanak EC motorokat. Ennek megvalósításához a gyártók a motor tekercselését állandó mágnesekkel helyettesítik, kommutációs áramköri elemeket építenek be, így kiküszöbölhető a szénkefék mechanikus kopása. Egy EC motorban az elektromágnesek nem mozognak; helyettük az állandó mágnesek forognak, és az armatúra marad nyugvó, így a mozgó armatúrába könnyen átvihető az áram. Az állórész egyszerűen tekercspárokból áll, melyek egy ferromágneses lemezekből álló magon vannak. A kefe-kommutátor rendszert felváltja egy elektronikus vezérlő. A vezérlő hasonlóan osztja el az áramot, mint az egyenáramú kefés motornál történik, de ez egy félvezetős áramkör a kefe-kommutátor rendszer helyett. A tekercspárokra egymás után kapcsol feszültséget a vezérlő, így jön létre a forgó mágneses mező. A motoron kívül itt kaptak helyet az elfordulásmérők, valamint a sebességmérők is. Ezek felelősek a kerekenkénti fordulatszám, valamint a pillanatnyi sebesség meghatározásáért, az adatok pedig folyamatosan továbbítódnak a vezérlő áramkör felé, amely a kerekek mellett helyezkednek el.

Giroszkóp az egyensúlyért
Az elfordulásmérők és a sebességmérők adatai a giroszkóphoz és a sebességvezérlő áramkörhöz továbbítódnak, majd innen a segway „lelkéhez” a mikrovezérlőhöz továbbítódnak. Az első elindulás előtt a giroszkópot kalibrálni kell a megfelelő egyensúlyi állapothoz. Fontos a jó beállítás, mert a további információkat ehhez képest állítja be a készülék. A szabályozás folyamatos, azaz a mikrovezérlő állandóan kompenzálja a megfelelő pozíciót annak érdekében, hogy ne boruljunk fel a járművel. A segway irányítása két pedálos nyomáskapcsolóval történik, amikor elindulunk előre (a testsúlyunkat előredöntjük), az elülső kapcsoló aktiválásra kerül, a beépített infravörös fényforrás és szenzor közötti szabad út pedig lezárul egy apró műanyag „fal” segítségével. Ezzel azt az utasítást adva a hoverboard-nak, hogy szeretnénk vele elindulni. Hátramenet esetén a hátsó infravörös szenzor jele kerül megszakításra és a hátsó kapcsoló aktiválásra. Ha csak egyenesen állunk, akkor mindkét szenzor szabadon van, ezzel jelezve a mikrovezérlőnek, hogy a motorok ne mozduljanak egyik irányba se. Amikor balra szeretnénk fordulni, akkor a jobb lábunkkal aktiváljuk a jobb első kapcsolót, ezzel egyidőben a jobb oldali kerekek elindulnak előre. Mindeközben a bal lábunkkal a bal hátsó kapcsolót aktiválva a bal oldali kerekek pedig ellenkező irányba, azaz hátra kezdenek el forogni, a két kerék ellenkező mozgása pedig a kívánt irányba fog minket forgatni.
A Villanyszerelők Lapja egy havi megjelenésű épületvillamossági szaklap, amely nyomtatott formában évente 10 alakommal jelenik meg. A VL elsődlegesen a villanyszereléssel, épületvillamossági kivitelezéssel foglalkozó szakembernek szól, de haszonnal olvashatják üzemeltetők, karbantartók, társasházkezelők és mindenki, aki érdeklődik a terület újdonságai, előírásai, problémái és megoldásai iránt.
A VL előfizetési díja egy évre 12 990 Ft, amelyért 10 lapszámot küldünk postai úton. Emellett az előfizetőink pdf-ben is letölthetik a legfrissebb lapszámokat, illetve korlátlanul hozzáférhetnek a korábbi számok tartalmához is, így 23 évnyi tudásanyagot vehetnek bírtokba.