
Az ideális motorindító III. - A három fázisú inverter
2004/9. lapszám | netadmin | 6835 |
Figylem! Ez a cikk 22 éve frissült utoljára. A benne szereplő információk mára aktualitásukat veszíthették, valamint a tartalom helyenként hiányos lehet (képek, táblázatok stb.).
Az ideális motorindító III.Háromfázisú inverter Az előző fejezetben bemutatott háromfázisú egyenirányító és az arra csatlakozó nagy kapacitású szűrőkondenzátor látja el tápfeszültséggel a háromfázisú invertert. Az invertert alkotó hat darab kap...
Háromfázisú inverter
Az előző fejezetben bemutatott háromfázisú egyenirányító és az arra csatlakozó nagy kapacitású szűrőkondenzátor látja el tápfeszültséggel a háromfázisú invertert. Az invertert alkotó hat darab kapcsolóelem szigetelt kapus bipoláris tranzisztor (IGBT), integrált visszavezető diódával. Kis teljesítményű készülékeknél (15kW-ig) az inverter egyetlen tokba épített nagyteljesítményű integrált áramkör, sőt még az egyenirányítót és a fékező modult is tartalmazza. Közepes teljesítményű készülékeknél (18,5kW és 75kW között) a kapcsoló elemek párban tokozottak illetve egyedi tokozásúak. A nagyteljesítményű készülékeknél (90kW és 1MW között) pedig minden esetben egyedi tokozásúak illetve párhuzamosan kötött IGBT-k alkotják az egyes kapcsoló elemeket. A legfejlettebb (ma már negyedik generációs) félvezető elemek intelligens teljesítmény-modulok és nagyon nagy bekapcsolási és kikapcsolási meredekséggel rendelkeznek. Az intelligenciája ezeknek az elemeknek abban rejlik, hogy integrált belső vezérléssel és elektronikus védelemmel vannak ellátva. Ennek következtében képesek a veszélyes mértéket megközelítő terhelő áram illetve üzemi túlfeszültség kialakulása esetén a vezérlést blokkolni és így a károsodást elkerülni. Az ilyen elemekből felépített invertert lehetetlen tönkretenni túlterheléssel, kimeneti fáziszárlattal, földzárlattal vagy a terhelés lekapcsolásával illetve túlfeszültséget okozó, a megengedhető mértéket meghaladó intenzitású fékezéssel (túlfékezéssel).
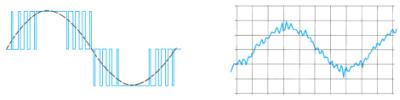
1.ábra,
Szinuszhullámmal modulált kimeneti impulzussorozat és
Motoráram hullámformája
Az inverer egyes kapcsolóelemeinek vezérléséről a mikroprocesszoros vezérlőáramkör (lásd az előző fejezet 1. ábráján) gondoskodik oly módon, hogy a háromfázisú kimeneti kapcsok között szinuszos impulzusszélesség-modulációjú, kétirányú (+ és -) impulzussorozat jelenjen meg. A moduláló szinuszhullám frekvenciájának értékét nullától tetszőleges értékig (általában legfeljebb 1000Hz-ig) képes változtatni, így lehetővé teszi az aszinkron motor fordulatszámának változtatását nulla és akár hússzoros névleges érték között (ha erre a motor alkalmas). A modulációt hordozó egyes impulzusok feszültsége kb. +540V illetve -540V, háromfázisú hálózati tápfeszültségnél (egyfázisú táplálásnál kb. +320 illetve -320V). A teljesítmény-félvezetők nagy kapcsolási meredekségének köszönhetően az impulzussorozat frekvenciája (az inverter szaggatási vagy kapcsolási frekvenciája) a 20kHz fölötti értéket is elérheti. Ez nagyon kedvező az aszinkron motor működése szempontjából, bár ennek ára van. Nagy kapcsolási frekvencia alkalmazásának előnye az, hogy a motorban tökéletesen szinuszos fluxus alakul ki és a motoráram felharmonikus tartalma jelentéktelen.
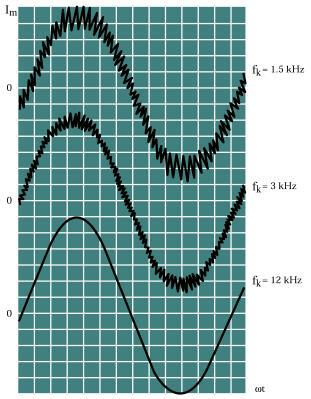
A nagy kapcsolási meredekségnek köszönhető az is, hogy egy adott kapcsolási frekvencián üzemeltetve az invertert, a kapcsolási veszteség - az előző generációs félvezető eszközökhöz viszonyítva - nagyon kicsi; vagy pedig azonos készülékveszteséget (és hűtési körülményeket) feltételezve magasabb az elérhető kapcsolási frekvencia. Ennek ellenére a készülékgyártók - még akkor is, ha egy határig lehetővé teszik a kapcsolási frekvencia tetszés szerinti növelését - 2kHz és 8kHz közötti értéket adnak meg gyári beállításként, mivel a nagy kapcsolási frekvenciának (és a nagy kapcsolási meredekségnek) hátránya is van, másrészt pedig azért, mert a készülék hűtését névleges terhelő áramnál és közepes kapcsolási frekvenciánál jelentkező veszteségre méretezik. (Az 1. ábrán látható az inverter kimeneti feszültségének és a motor áramának oszcillogramja, a szemléletesség kedvéért nagyon alacsony, kb. 1kHz kapcsolási frekvencián. A 2. ábrán a különböző, egyre növekvő kapcsolási frekvenciáknál kialakuló motoráram hullámformája látható. Szembetűnő a nagyobb kapcsolási frekvencia kedvező hatása a motoráramra.)
1.ábra,
Szinuszhullámmal modulált kimeneti impulzussorozat és
Motoráram hullámformája
A hátrányos következmények, melyeket az alkalmazás tervezésénél és a berendezés telepítésénél figyelembe kell venni, annak érdekében, hogy a hatásuk jelentéktelen legyen, az alábbiak lehetnek:
- A motor kapcsain a kábel hosszától és fajtájától függően a feszültségimpulzus csúcsértéke 1000V-ot is meghaladhatja, (3. ábra) ezért a lehető legrövidebb motorkábel alkalmazására kell törekedni.
- A régebbi gyártású motorok, vagy az újratekercselt motorok szigetelése fokozottan öregszik a szigetelőanyagban a nagy frekvenciájú és nagy feszültség-meredekségű impulzussorozattal történő táplálás következtében fellépő dielektromos veszteség miatt. (Ez az anyagra jellemző dielektromos veszteségi szöggel arányos és tg?-val jelölt értéktől függ.)
Mivel ma már minden motorgyártó frekvenciaváltós táplálásra alkalmas, megerősített szigetelésű motort készít, az ilyen motorok minden további nélkül csatlakoztathatók a bemutatott inverterekre. Azon alkalmazásoknál viszont, melyeknél nincs adat a motor jellemzőiről, vagy régi illetve újratekercselt motort kell vezérelni, az inverter kimeneti kapcsaira sorosan csatlakoztatott háromfázisú fojtótekercs megszünteti a szigetelőanyag fokozott öregedését, mivel korlátozza a motorra jutó feszültség meredekségét. Ez a megoldás a hosszú motorkábel alkalmazását is lehetővé teszi.
- A nagyfrekvenciás impulzussorozattal való táplálás a motorhoz csatlakozó kábel kapacitásán minden egyes impulzusélnél áramimpulzust hoz létre. Az árnyékolt (páncélozott) motorkábel esetében még a föld és az erek közötti kapacitás is jelentkezik. Minél hosszabb a motorkábel annál nagyobb a kábelkapacitás. Ennek következménye az, hogy a kábelkapacitáson keletkező áramimpulzus csúcsértékével csökken az inverter túlterhelhetősége. Minden frekvenciaváltó rendelkezik valamekkora túlterhelhetőséggel. Ez általában a névleges áram 1,5 ... 1,8-szorosa, egy percen keresztül. Ez az áramtöbblet a technológiai berendezés elindításához és a gyorsításához szükséges névleges fölötti motornyomatékot (gyorsítónyomatékot) hozza létre, illetve biztosítja az üzem közben fellépő, rövid idejű túlnyomatékot. Abban az esetben, ha a megadott túlterhelhetőségre (vagy gyorsítónyomatékra) szükség van, akkor 50m-nél hosszabb, normál kapacitású árnyékolt motorkábel alkalmazása mellett a kimeneti fojtót kell alkalmazni, ami csökkenti a kábelkapacitáson folyó áramimpulzus csúcsértékét. (Árnyékolatlan kábelt alkalmazva 100m kábelhossz alatt még nem szükséges kimeneti fojtót alkalmazni.)
- A kábelkapacitáson kialakuló áramimpulzus következtében, a kábel nagyfrekvenciás sugárzásával zavarhatja a környezetében lévő és erre érzékeny berendezéseket. A zavarjel továbbterjedhet a motorkábel közelében lévő hálózati (és egyéb) vezetékeken. Ez a zavaróhatás csökkenthető, ha a motorkábel nyomvonala a hálózati (és egyéb) vezetéktől legalább 30cm távolságra van és a kábel árnyékolt. Fontos, hogy a kábel árnyékolása mindkét végén nagyfrekvenciás szempontból is megfelelően, nem korrodáló felületre, lehető legkisebb átmeneti ellenálláson legyen leföldelve. (Hosszabb kábelt alkalmazva, legalább 10m-enként meg kell ismételni az árnyékolás földelését. A motorkábel számára fém kábeltálca vagy kábelcsatorna alkalmazása kifejezetten ajánlott, feltéve, hogy annak a folytonossága nem szakad meg.)
Ez az óvintézkedés az új telepítésű technológiák esetében megvalósítható, de egy meglevő technológiához épített frekvenciaváltó esetében nem minden esetben. Ilyenkor a kimeneti fojtó alkalmazása megoldást jelenthet. Ez jelentősen csökkenti a kábel (és a motor) sugárzását.
- A kapcsolóüzemű inverter működése során, a hálózati tápvezetéken uV-os nagyságrendű, rádiófrekvenciás tartományba eső zavarfeszültség keletkezik, ami vezetett módon továbbterjed a villamos hálózaton és zavarhatja a rádióvétel elvén működő készülékek működését. A megjelenő rádiófrekvenciás zavarfeszültség nagysága függ a motorkábel hosszától és a félvezetők kapcsolási meredekségétől. Az EMC szabvány (elektromágneses kompatibilitás szabványa) egyrészt korlátozni rendeli az erősáramú kapcsolóüzemű készülékek által termelt vezetett rádiófrekvenciás zavarfeszültséget (és a sugárzás útján keletkező elektromágneses zavaró térerőt is), másrészt előírja azt, hogy elektronikus készülékek (minden elektronikus készülék) egy bizonyos határig zavartűrő képességgel rendelkezzenek. Ezek a korlátozások teszik lehetővé a zavarérzékeny és a zavart keltő berendezések egymáshoz közeli működését. A frekvenciaváltó készülékek gyártói a vezetett rádiófrekvenciás zavarfeszültség kibocsátásának szabvány szerinti korlátozását úgy oldják meg, hogy a készülék hálózati csatlakozói mögé rádiófrekvenciás zavarszűrőt építenek be. (A sugárzott zavarkibocsátást viszont a telepítés helyén, gondos szereléssel lehet korlátozni a fentebb leírt módon.)
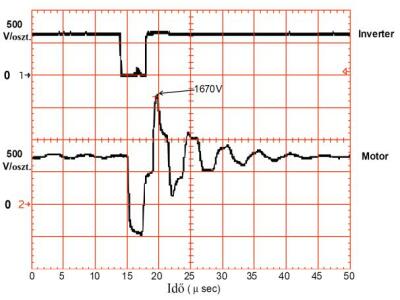
3. ábra
A motorfeszültség és az inverter kimeneti feszültség
egy rövid szakaszának oszcillogramja, hosszú motorkábellel
A fenti felsorolásból következik, hogy az ilyen korszerű berendezések alkalmazásának tervezéséhez, beszereléséhez nem elegendő a hálózati frekvenciás szemlélet és gyakorlat, hanem nagyfrekvenciás szemléletre van szükség, hogy a felhasználás során zavarproblémák ne jelentkezzenek.
A motor üzemi frekvenciájának megfelelő feszültség (a motor tápfeszültsége) a kimeneti impulzussorozat szünetidejének nagyságával és az impulzusszélességgel változtatható nulla és a tápláló hálózatnak megfelelő feszültségérték között. (Egy 3x400V névleges feszültségű motornál például 0Hz-nél 0V, 5Hz-en 40V, 25Hz-en 200V, 50Hz-en 400V, a kimeneti vonali feszültség, tehát elméletileg lineárisan növekszik nulla és a tápfeszültség értéke között, az üzemi frekvenciával arányosan. Gyakorlatban azonban a motor tekercselésének ellenállását is figyelembe kell venni (a vezérlés ezt kalkulálja, sőt automatikusan meg is méri a legújabb készülékeknél) és az azon eső feszültséget a mindenkori motorfeszültséghez hozzá kell adni (ez az IxR kompenzáció). A feszültség lineáris növekedésének a névleges fordulatszám fölött is folytatódnia kellene, tehát dupla fordulatszámnál (100Hz-en) 800V vonali feszültségre lenne szükség a névleges gerjesztés biztosításához. Ezt viszont a készülékek nem tudják szolgáltatni, ezért túlpörgetés esetén a motorok alulgerjesztetten (ebből következően csökkentett terhelő nyomatékkal) üzemelhetnek csak.
Rónyai Sándor
műszaki tanácsadó