
Az ideális motorindító IV.
2004/10. lapszám | netadmin | 4124 |
Figylem! Ez a cikk 22 éve frissült utoljára. A benne szereplő információk mára aktualitásukat veszíthették, valamint a tartalom helyenként hiányos lehet (képek, táblázatok stb.).
Mikroprocesszoros vezérlés A cikksorozat második részében látható volt frekvenciaváltó blokkvázlata. A készülék harmadik fő funkcióblokkja a mikroprocesszoros vezérlőáramkör. Ez az áramköri blokk állítja elő az előző részben bemutatott háromfázi...
A cikksorozat második részében látható volt frekvenciaváltó blokkvázlata. A készülék harmadik fő funkcióblokkja a mikroprocesszoros vezérlőáramkör. Ez az áramköri blokk állítja elő az előző részben bemutatott háromfázisú inverter vezérlő jeleit, melynek hatására szinuszos impulzusszélesség-modulációjú, szaggatott háromfázisú kimeneti feszültség keletkezik. Gondoskodik ezen kívül a motor forgórészének állandó és névleges értékű gerjesztéséről (fordulatszámtól és a terhelés nagyságától függetlenül), IxR kompenzációról, a motor aktuális terhelésének megfelelő szlip kompenzálásáról, a motor hővédelméről, a készülék túlmelegedés elleni védelméről, a külső vagy beépített fékegység vezérléséről, az invertert tápláló közbenső egyenfeszültség túlzott mértékű növekedésének megakadályozásáról (túlfékezés elleni védelem), az inverter túláram elleni védelméről, a tápláló hálózat figyeléséről, a motor tetszőlegesen beállítható idejű fel- és lefuttatásáról és a fordulatszámának szabályozásáról (fordulatszám-visszacsatolással vagy számítás útján), a hajtott technológia mennyiségi jellemzőjének szabályozásáról (pl. nyomásszabályozás), esetleg a hajtott berendezés védelméről, stb. A felsoroltakon kívül, gyártmánytól függően számtalan egyéb funkcióval rendelkezhetnek a vezérlőáramkörök. A legújabb frekvenciaváltók szinte kötelezően már el vannak látva legalább egy kommunikációs felülettel a digitális folyamatirányító eszközökhöz való csatlakoztatáshoz. (Vannak melyek bővíthetők tetszőleges kommunikációs modullal.)
Az ipari folyamatirányító rendszer kommunikációjának új és egységesen szabványos felületévé a számítógépes Ethernet hálózatoknál ismert nagysebességű (100 Mbit/sec-os) TCP/IP kommunikációs protokoll vált. Egyes frekvenciaváltó típusok weblapot tartalmazó Ethernet kártyával is elláthatók, melynek segítségével az ipari folyamatirányító hálózaton keresztül irodai PC-ken egy internetböngészővel elérhetőek és ellenőrizhetőek, jogosultság megléte esetén pedig konfigurálhatóak az aszinkronhajtások. Ez akkor lehetséges, ha irodai számítógépes hálózat csatlakoztatva van az üzemi folyamatirányító Ethernet hálózathoz, olyan illesztőmodulokon keresztül (router-ek, switch-ek), melyek hatására a vezérlő hálózat sebessége nem csökken és megfelelő biztonságot nyújtanak.
Egyre több készülék már kiegészíthető önálló kommunikációs felülettel rendelkező, tetszőlegesen programozható vezérlőmodullal is. Ezzel már, a felhasználó által megírt és betöltött program segítségével, megvalósítható a hajtott technológiai berendezésen végbemenő ipari folyamat irányítása és a felsőbb folyamatirányító rendszer kiszolgálása. Tehát a vezérlő hálózatban egy alsó szintű PLC-t helyettesíthetnek a frekvenciaváltóban elhelyezett kiegészítő vezérlő modulok. Sőt fordulatszám-visszacsatolás megléte esetén, az aszinkron motorok szervo üzemmódját is meg lehet valósítani az erre alkalmas aszinkronhajtásokkal és a pozicionáló mozgási folyamatot is vezérelni lehet (pozíció-szabályozás, mozgásvezérlés) a beépített programozható vezérlő modulon keresztül. A különálló kommunikációs felületen a kihelyezet távoli ki-/bemeneti modulok (remote I/O-k) is elérhetők.
Ebből a rövid összefoglalóból látható, hogy a korszerű digitális vezérlési technológiának köszönhetően, a készülékek a hajtásvezérlési feladaton túlmenően korlátlanul bővíthetők és egyéb, a hajtott technológiához kötődő feladat ellátására is képessé tehetők.
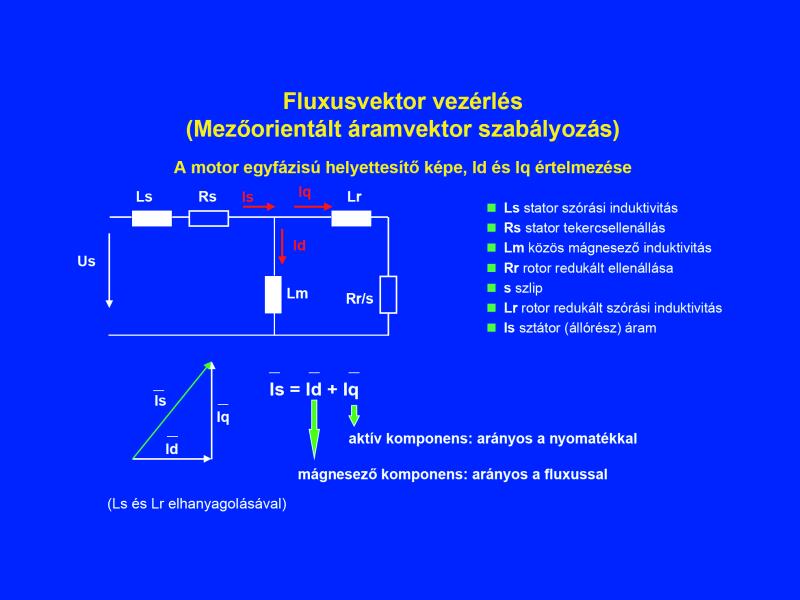
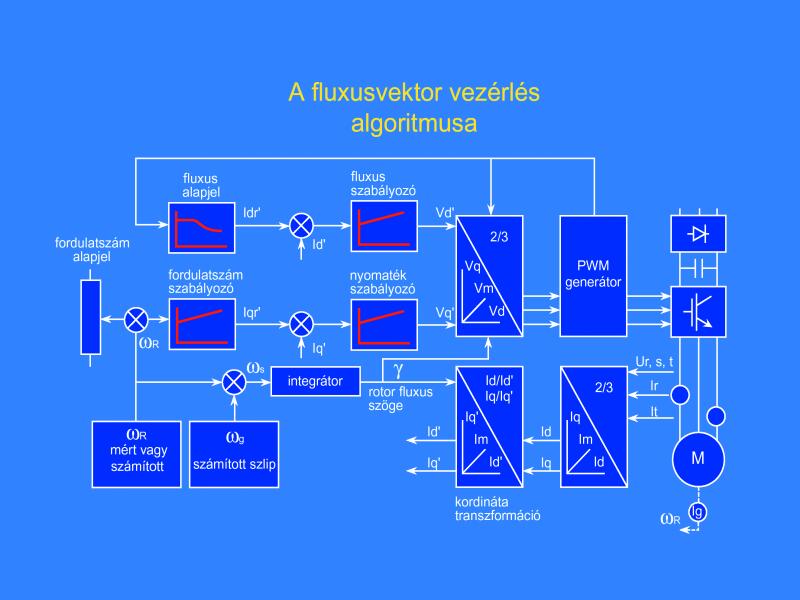
Visszatérve a frekvenciaváltók vezérlőáramkörének fő funkciójára, a kimeneti impulzusszélesség-modulált feszültség előállítására, valamint a motor gerjesztésének és nyomatékénak szabályozására, megállapítható, hogy a mai legkorszerűbb frekvenciaváltók vezérlési stratégiája a fluxusvektor-vezérlés (FVC), vagy más néven a mezőorientált áramvektor szabályozás. Leegyszerűsítve ennek lényege az, hogy a vezérlőáramkör a motor áramvektorával arányos jelet két, egymásra merőleges összetevőre bontja. (1. ábra) A vízszintes irányú összetevő a motor gerjesztésével arányos, a függőleges pedig a motor nyomatékával. Ennek a két összetevőnek a felhasználásával, mint ellenőrző jellel a vezérlőáramkörben két szabályozókör működik, a gerjesztés-szabályozó és a nyomatékszabályozó. A gerjesztés-szabályozó a motor állandó nagyságú gerjesztéséről (mágneses mezőjének szabályozásáról) gondoskodik. (Ebből származik a mezőorientált elnevezés.) A nyomatékszabályozó feladata a mindenkori terhelő nyomatéknak megfelelő, azzal arányos áram előállítása. A nyomatékszabályozó egy harmadik szabályozónak, a fordulatszám-szabályozónak alárendelve működik, tehát attól kapja a nyomaték-alapjelet. Így valósul meg a motortengely fordulatszámának szabályozása. Ez a szabályozási struktúra a 2. ábrán látható.
A fordulatszám-szabályozó alapjelet kívülről kap. Ez határozza meg a motor mindenkori fordulatszámát. Az ellenőrző jelet pedig legtöbb esetben a vezérlőáramkör a beprogramozott motor modell alapján végzett számítás útján, minden pillanatban maga állítja elő. Ez a számított fordulatszám-visszacsatolás az esetek többségében megfelelő (±1%-on belüli) szabályozási pontosságot nyújt. Vannak azonban ennél kifinomultabb szabályozási struktúrát megvalósító hajtástípusok is. Ezek már a fordulatszám-visszacsatoláshoz igénylik a motor tengelyére épített digitális fordulatszám-jeladót (enkódert). Tehát a számítás helyett a valóságos fordulatszámnak megfelelő értékkel valósul meg a fordulatszám-visszacsatolás. Ily módon akár ±0,01%-os fordulatszám-pontosság is elérhető, a fordulatszám-jeladó felbontásától függően. Ennek a megoldásnak valójában ennél nagyobb jelentősége van. A fordulatszám-jeladóra épülő szabályozó rendszerrel megvalósított aszinkronhajtások a nagy szabályozási pontosságon túl nagyon nagy szabályozási dinamikával (a terhelésváltozásra történő gyors reagáló képességgel, hirtelen gyorsulással és lassulással) rendelkeznek és képesek akár álló motortengelynél is kifejteni a névleges nyomatékot, sőt túlnyomatékot is. (A számított visszacsatolással működő hajtások csak 0,5Hz ... 1Hz-nek megfelelő fordulatszámtól kezdve képesek nyomatékot kifejteni) Az enkóderrel visszacsatolt készülékkel megvalósított daruhajtás például képes lebegtetni a névleges motornyomatéknak megfelelő terhet. Süllyesztésnél nagyon finom és nagyon pontos pozícionálást tesz lehetővé a készülék ez által. Ez a jelenleg legfejlettebb hajtástípussal valósítható meg az aszinkron motor szervo üzemmódja is (nagyon nagy szabályozási dinamikának és az álló tengelynél kifejtett nyomatéknak köszönhetően).
Végezetül röviden még néhány hasznos funkció, melyek rendelkezésre állhatnak a számított fordulatszám-visszacsatolású és enkóderes visszacsatolású készülékkekben is (gyártmánytól függően):
- Forgó motor "elkapása" vagy "repülő start" funkció
Ez a funkció nagyon előnyös lehet például egy ventilátor indításánál a huzatos légcsatornában. Ilyen alkalmazásnál a ventilátor leállított állapotban is forog. Frekvenciaváltóval történő indítása csak teljesen lefékezett állapotban lenne lehetséges e nélkül a funkció nélkül. A "repülő start" funkcióval viszont lehetséges a forgó motor indítása is. Indításkor a készülék megkeresi a motor pillanatnyi fordulatszámát és az annak megfelelő frekvenciával kezdi felfuttatni a motort. Másik ilyen alkalmazás az a technológia lehet, mely igényli ezt a funkciót, ahol rövid idejű hálózat kimaradás után, még forgó motorral azonnal újra kell indulni. - Hálózat kimaradás áthidalása funkció
Az előző példa szerinti hálózat kimaradás pillanatában kikapcsolódik a frekvenciaváltó. Ennél az alkalmazásnál viszont a hálózat kimaradása után is tovább táplálja a készülék a motort. Tehát a motoráram nem szűnik meg. Ezt úgy éri el a frekvenciaváltó (feltéve, hogy a motor tengelyén jelentős forgó tömeg van, mely a mozgást fenntartja), hogy a motort generátoros üzemmódba vezeti, de csak olyan mértékben, hogy a visszatáplált energia a készülék és a motor veszteségét fedezze. Ily módon jelentős ideig tartó hálózat kimaradást is áthidalhat a frekvenciaváltó anélkül, hogy a motor megállna (legfeljebb csak, az elhasznált energia mértékének és a súrlódási és egyéb közegellenállásnak megfelelően, lassul). A hálózat visszatértekor a készülék visszavezeti a motort az eredeti fordulatszámra, mintha mi sem történt volna. - Fékezés funkció
Olyan alkalmazásoknál, melyeknél a motor jelentős forgó tömeget hajt, a gyors megállítás nem lehetséges, mert a fordulatszám csökkentésének a forgó vagy mozgatott tömeg ellenáll. Ilyenkor a motor generátoros üzembe kényszerül és visszatáplál az inverteren keresztül a közbenső egyenfeszültségű áramkörbe. Ugyan ez történik, amikor a motor aktív terhelést hajt (pl. daruüzemben süllyesztéskor). A közbenső egyenfeszültség emelkedni kezd és a veszélyes határérték előtt a vezérlőáramkör "túlfékezés" hibajelzéssel lekapcsolja a készüléket. Ennek elkerülése érdekében a készülékgyártók általában a kis és a közepes teljesítményű frekvenciaváltókba (többnyire 75kW-ig) beépítenek egy fékező modult. Ez a közbenső egyenfeszültségű áramkörbe épített kapcsoló elem, melyre kívülről, a fékezési teljesítménynek és a készüléknagyságnak megfelelő teljesítményű és ohmértékű ellenállást kell csatlakoztatni. A nagyteljesítményű készülékekhez többnyire, ha szükséges, egy külső fékegységet kell csatlakoztatni a megfelelő ellenállással. (Ezek a nagyteljesítményű, külső fékegységek ma már lehetnek a hálózatba visszatápláló inverterek is.) A vezérlőáramkör figyeli a közbenső egyenfeszültség nagyságát és egy határértéknél bekapcsolja a fékegységet. A külső ellenálláson átfolyó áram hatására elkezd csökkenni az egyenfeszültség. A vezérlés egy alsó határértéknél kikapcsolja a fékmodult. Tehát kétpontszabályozással határértékek között tartja az egyenfeszültség értékét, ily módon a csatlakoztatott ellenálláson elemészti a motor által termelt generátoros energiát és ezáltal fékezi a tehetetlen tömeg vagy az aktív terhelés által hajtott motort.
Rónyai Sándor